Tactile Sensing
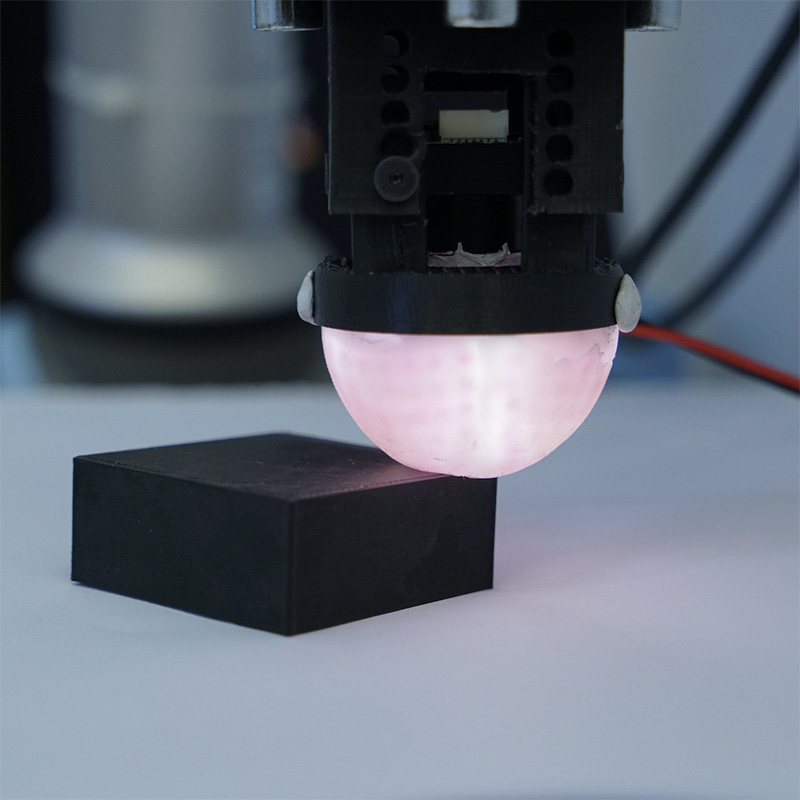
By using a new color-mixing based signal processing methods, we developed a soft tactile sensor that is able to estimate the 3d forces and deformations of the contact with different objects. Known strategies of human processing and perception of tactile input can be also applied to the sensor, which resulted in a new signal processing methods that is able to extract the frictional resistance of a material, within the first millisecond of a contact with an object, before even a frictional force is present.